How should I calculate K in Rodrigues' rotation formula from the second order equation?
 Matthew Harrington
Matthew Harrington 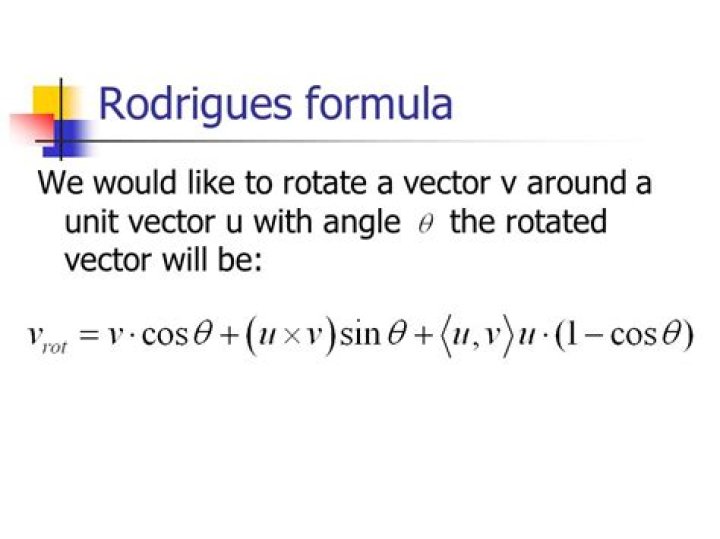
from Rodrigues' formula we know that :
$$K^{2}\left ( 1 - \cos\varphi \right ) + K \sin{ \varphi} + I = R$$
we also know that $K$ should be
$$K =\frac{1}{2 \sin {\left ( TR \right )} }\left ( R - R^{T} \right )$$
I am wondering how we get from the above equation to solve for $K$ ?
If , given that $K$ is a matrix, then :
$$\frac{1}{2} * \frac{(R(3,2) - R(2,3)) }{\sin {(TR)} }* \theta $$
should give the scaled axis of rotation , the above case is only one of the axis.
but I am wondering : what are the directions of the three vectors on which we decompose the 3 rotations ?
$\endgroup$ 11 Answer
$\begingroup$The skew-symmetric matrix $K$ is constructed from the unit vector $n$ (aka the axis of rotation).$$\eqalign{
K &= \left[\begin{array}{r}0&-n_3&n_2\\n_3&0&-n_1\\-n_2&n_1&0\end{array}\right],
\quad K^2 &= nn^T-I,
\quad K^3 &= -K
\\
}$$The matrices $(I,K^2)$ are symmetric, therefore$$\eqalign{
I-I^T &= 0 \\
K^2-(K^2)^T &= 0 \\
R-R^T &= (K\sin\varphi - K^T\sin\varphi) \;=\; 2K\sin\varphi \\
K &= \frac{R-R^T}{2\sin\varphi} \\
}$$Since $Kn=0$, axis of rotation $(n)$ is an eigenvector of $K$with eigenvalue zero.
The remaining eigenvectors can be constructed from any vector $b\ne\lambda n$.$$\eqalign{
v_{\pm} &= (K^2\pm iK)b \\
Kv_{+} &= (K^3+iK^2)b \\ &= i(K^2+iK)b \\&=iv_+ \\
Kv_- &= -iv_-\\
K^2v_{\pm} &= (\pm i)^2 v_{\pm} = -v_{\pm} \\
}$$It is easy to show that these are also the eigenvectors of $R$.$$\eqalign{
Rn &= In + Kn\sin\varphi + K^2n(1-\cos\varphi) \\ &= n + 0\sin\varphi + 0(1-\cos\varphi) \\ &= n \\
Rv_{\pm} &= Iv_{\pm} + Kv_{\pm}\sin\varphi + K^2v_{\pm}(1-\cos\varphi) \\ &= v_{\pm} \pm v_{\pm}\,i\sin\varphi - v_{\pm}(1-\cos\varphi) \\ &= (\cos\varphi \pm i\sin\varphi)\,v_{\pm} \\ &= e^{\pm i\varphi}\,v_{\pm} \\
}$$