Derivative of rotating unit vector in coordinate free maner
 Mia Lopez
Mia Lopez 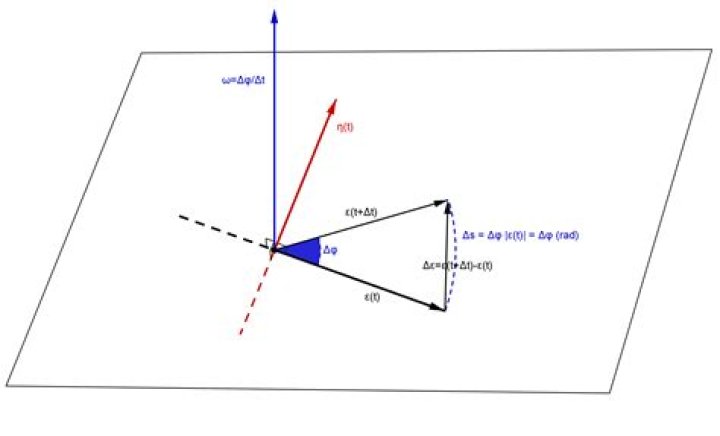
How can we calculate the derivative of a rotating unit vector in a coordinate free way? That is, we want to compute the derivative -with respect to time- of a vector function $\vec{\varepsilon}: [0, +\infty) \rightarrow \mathbb{R}^{2}$, whose length is kept constant and equal to one $|\vec{\varepsilon}(t)|=1$ for any $t \in [0, +\infty)$.
(Such computations are frequently useful in physics, especially in kinematics, when calculating velocities, accelerations etc, especially in many-body problems where the use of a single coordinate system might prove disfunctional).
Below, one answer is posted but it would be nice to see other approaches as well.
$\endgroup$ 61 Answer
$\begingroup$We will use $t$ to denote the independent variable since it normally stands for time.
Thus, at any given instant $t$, the value of the function will be a unit vector $\vec{\varepsilon}(t)$.
We will apply the definition of the derivative, so we need to compute the vector
\begin{equation} \label{def1}
\frac{d}{dt}\vec{\varepsilon}(t) = \lim_{\Delta t \rightarrow 0} \frac{\vec{\varepsilon}(t + \Delta t) - \vec{\varepsilon}(t)}{\Delta t}
\end{equation} First note that since $|\vec{\varepsilon}(t)|^{2} = \vec{\varepsilon}(t) \cdot \vec{\varepsilon}(t) = 1$ by differentiating both sides we get
$$
\begin{array}{c}
\frac{d}{dt} \big( \vec{\varepsilon}(t) \cdot \vec{\varepsilon}(t) \big) = \frac{d \vec{\varepsilon}(t)}{dt} \cdot \vec{\varepsilon}(t) + \vec{\varepsilon}(t) \cdot \frac{d \vec{\varepsilon}(t)}{dt} = \\ \\
2 \frac{d \vec{\varepsilon}(t)}{dt} \cdot \vec{\varepsilon}(t) = 0 \Leftrightarrow 2 \frac{d \vec{\varepsilon}(t)}{dt} \cdot \vec{\varepsilon}(t) = 0
\end{array}
$$ Thus $\frac{d \vec{\varepsilon}(t)}{dt} \cdot \vec{\varepsilon}(t) = 0$ which is equivalent to the fact that $\vec{\varepsilon}(t)$ and its derivative vector $\frac{d \vec{\varepsilon}(t)}{dt}$ are perpendicular
\begin{equation} \label{def2}
\vec{\varepsilon}(t) \bot \frac{d \vec{\varepsilon}(t)}{dt}
\end{equation}
The situation can be presented in the following picture:$\Delta s$ is the length of the arc spanned by the edge of the unit vector $\vec{\varepsilon}(t)$ while it rotates by an angle of $\Delta \varphi$ during time $\Delta t$. Since $\varphi$ is measured in radians we have $\Delta s = \Delta \varphi |\vec{\varepsilon}(t)|$ which implies that
$$
\Delta s = \Delta \varphi
$$
Notice that (in the figure) we also have: $|\vec{\eta}(t)|=1$ and $ \ \vec{\eta}(t) \bot \vec{\varepsilon}(t)$.
Now, during that time interval $\Delta t$ the vector has changed by
$$
\Delta \vec{\varepsilon} = \vec{\varepsilon}(t + \Delta t) - \vec{\varepsilon}(t)
$$
While $\Delta t \rightarrow 0 $ (the notation $dt \rightarrow 0$ will be used instead from now on) we can notice two things: i). the direction of the vector $d \vec{\varepsilon} = \vec{\varepsilon}(t + dt) - \vec{\varepsilon}(t)$ "tends" to become perpendicular to $\vec{\varepsilon}(t)$ and thus parallel to the direction specified by $\vec{\eta}(t)$ and ii). the length of the vector $d \vec{\varepsilon}$ "tends" to become equal to the length of the arc $ds$ thus
\begin{equation} \label{def3}
|d \vec{\varepsilon}| = |\vec{\varepsilon}(t + dt) - \vec{\varepsilon}(t)| = ds = d \varphi
\end{equation}
(where $d \varphi$ is measured in radians). Now, combining the above, and substituting in $\frac{d}{dt}\vec{\varepsilon}(t)$ we get
$$
\begin{array}{c}
\frac{d}{dt}\vec{\varepsilon}(t) = \lim_{dt \rightarrow 0} \frac{\vec{\varepsilon}(t + dt) - \vec{\varepsilon}(t)}{dt} = \lim_{dt \rightarrow 0} \frac{d \varepsilon}{dt} = \frac{d \varphi}{dt} \vec{\eta}(t)
\end{array}
$$ Finally, if we define a vector $\vec{\omega}$ with direction perpendicular to the plane defined by $(\vec{\varepsilon}(t), \vec{\eta}(t))$ and with length $|\vec{\omega}|=\frac{d \varphi}{dt}$ then we have
$$
\frac{d}{dt}\vec{\varepsilon}(t) = \vec{\omega} \times \vec{\varepsilon}(t) = \frac{d \varphi}{dt} \vec{\eta}(t)
$$




